Mechanika pohybu
Mechanika pohybu ramen soustavy
EK
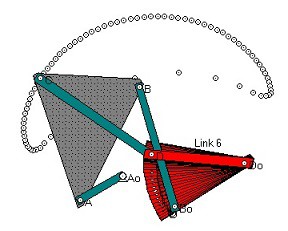
Trajektorie pohybu bodu
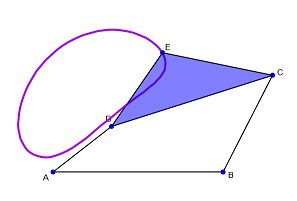
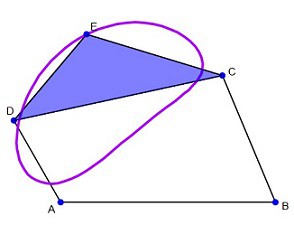
Soustava 1): trajektorie bodu E ; (body A a B jsou pevné). :
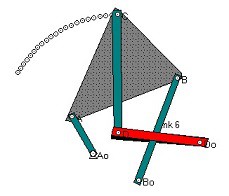
Soustava 2): trajektorie bodu C a ramene Link 6; (body Ao, Bo, Do jsou pevné)
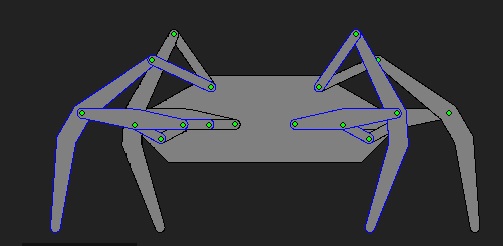
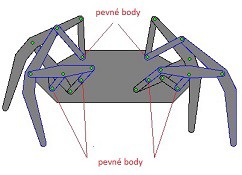
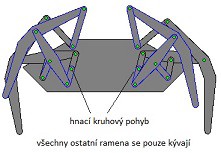
Příklad jednoduchého pavoučího pohybu používaného v robotice
Modře označená táhla patří předním nohám, černě označená zadním nohám.
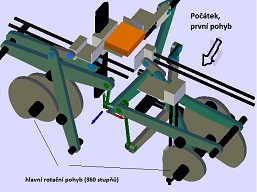
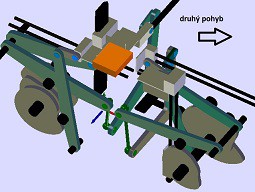
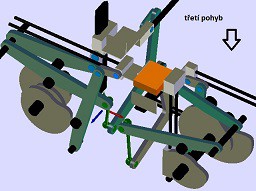
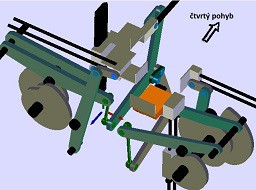
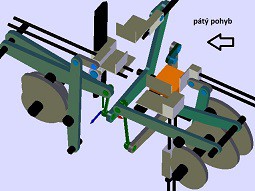
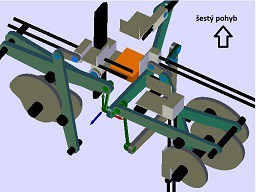
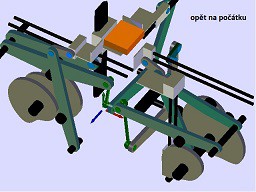
Podávací mechanizmus, často používaný v automatizaci
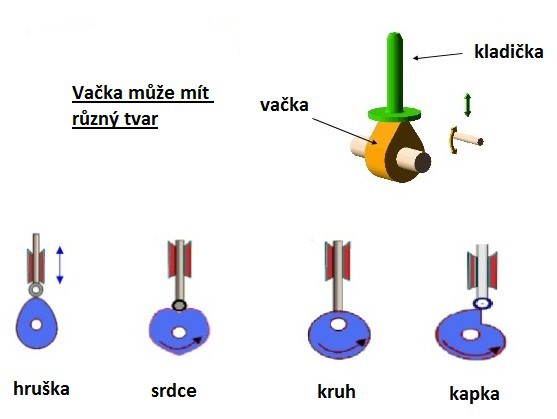
Příklad podávacího mechanizmu, který cyklicky presouvá předmět postupně do 6-ti poloh