


Strojové učení (3)
Hledání cesty k cíli

Hledání cesty bez překážek
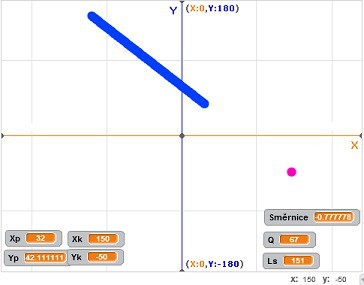
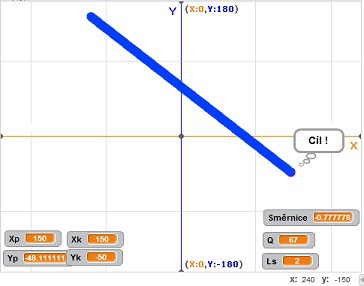
Jde o klasický příklad robotické úlohy - robot se má v uzavřeném prostoru dostat z bodu A do bodu B. Důležité je, zda jsou pro řešení úlohy (z hlediska časové náročnosti pro prohledávání stavového prostoru) dostupné další informace či nikoliv. Podle toho rozdělujeme použité algoritmy na informované a neinformované. Nechť v našem prvním případě je dostupná informace o souřadnicích obou bodů. Řešení je velmi snadné, cesta je úsečka určená bodem startu a cílovým bodem.
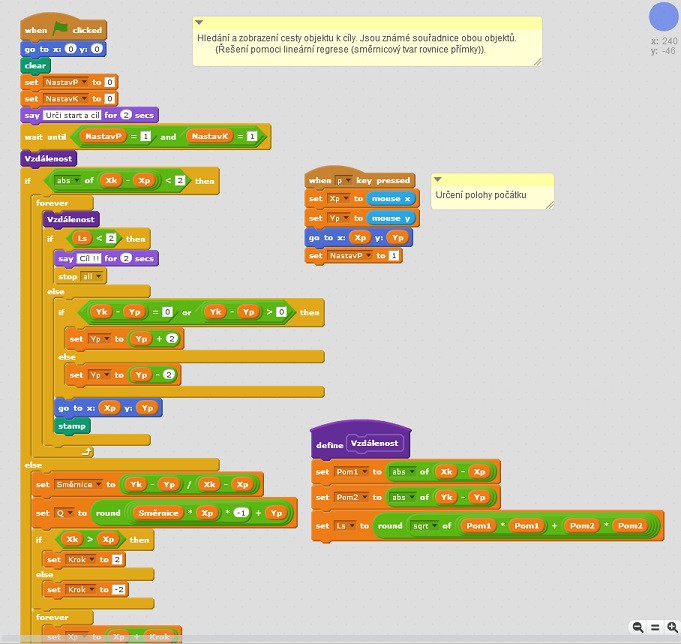
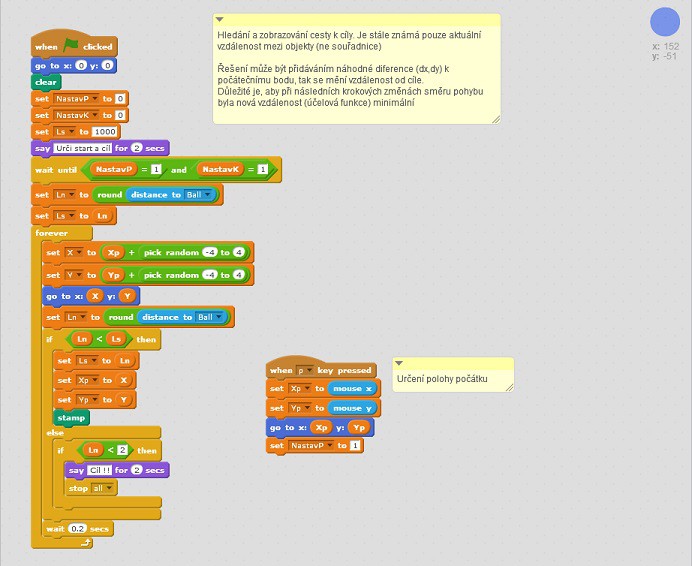
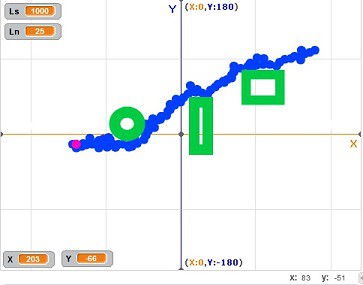
Druhý příklad má stejné zadání, ale je dostupná pouze informace o vzdálenosti robota od cíle, nikoli směr.
Tady je pro řešení úlohy zvolena heuristické metoda prohledávání cesty. Z výstupu je vidět rozdíl ve trase cesty, když bylo stejné zadání spuštěno dva krát za sebou.


Rozšířením předchozího algoritmu lze obcházet i překážky na cestě k cílovému bodu.

Domácí úkol: zadání je stejné, ale bez znalosti souřadnic bodů i vzdálenosti mezi body. Nabízí se triviální řešení "hrubou silou", systematicky prohledávat plochu bod po bodu až narazíme na bod cíle. Otázka k zamyšlení, existují i rychlejší postupy řešení úlohy, (za jakých předpokladů), nebo co nám řešení usnadňuje v konkrétních robotických aplikacích ?

